解决在Vscode开发ROS没有提示
首先在.vscode文件夹下的c_cpp_properties.json文件修改成下图: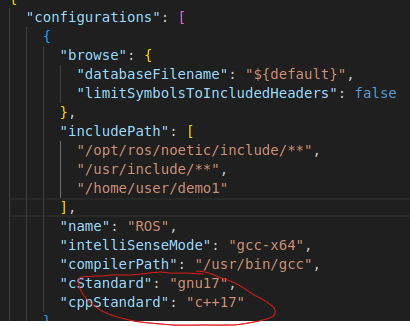
在上图的includePath中加入自己工作空间的路径
使用Cmake+hal库开发STM32无法通过printf打印浮点数
在开发STM32中,代码如下:
STM32单片机下载显示failed to erase memory
在焊接新的芯片后下载程序显示下图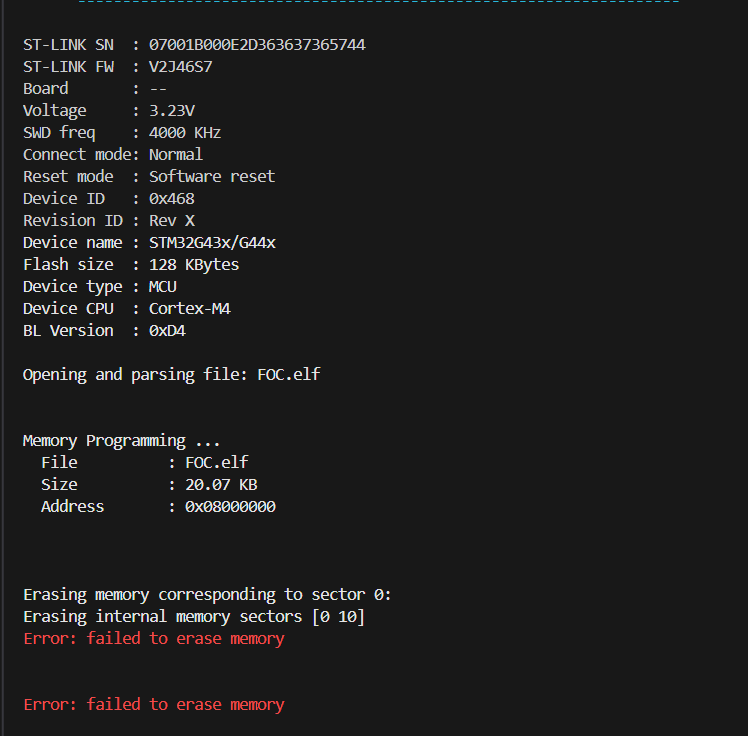
错误显示无法擦除扇区,连接ST-LINKUtility显示如下: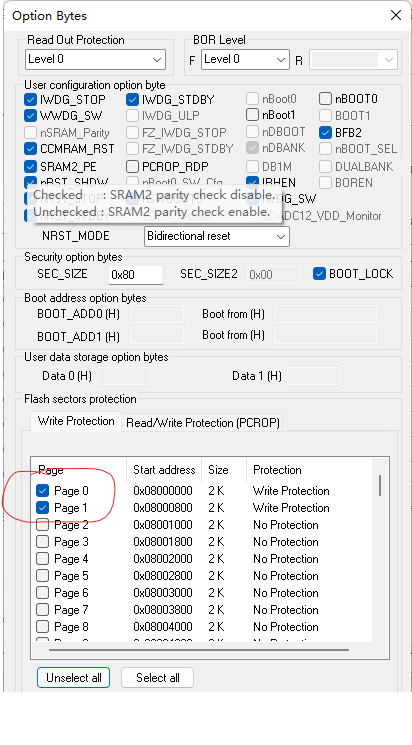
发现扇区0.1被锁住,取消勾选,再点击apply就行。我买的不是全新的吗?????
解决STM32G431BOOT0与IIC冲突问题
- 在STM32G431中,启动时选择主Flash启动,此时需要将BOOT0引脚拉低为低电平,但此时BOOT0引脚作为IIC外挂了4.7k电阻,此时不可能将引脚拉低。
Vscode开发STM32G431使用串口重定向
- 在Vscode中使用STM32 VS Code Extension来开发STM32G431不同于keil,在keil中,我们只要勾选MicroLIB就能实现串口重定向
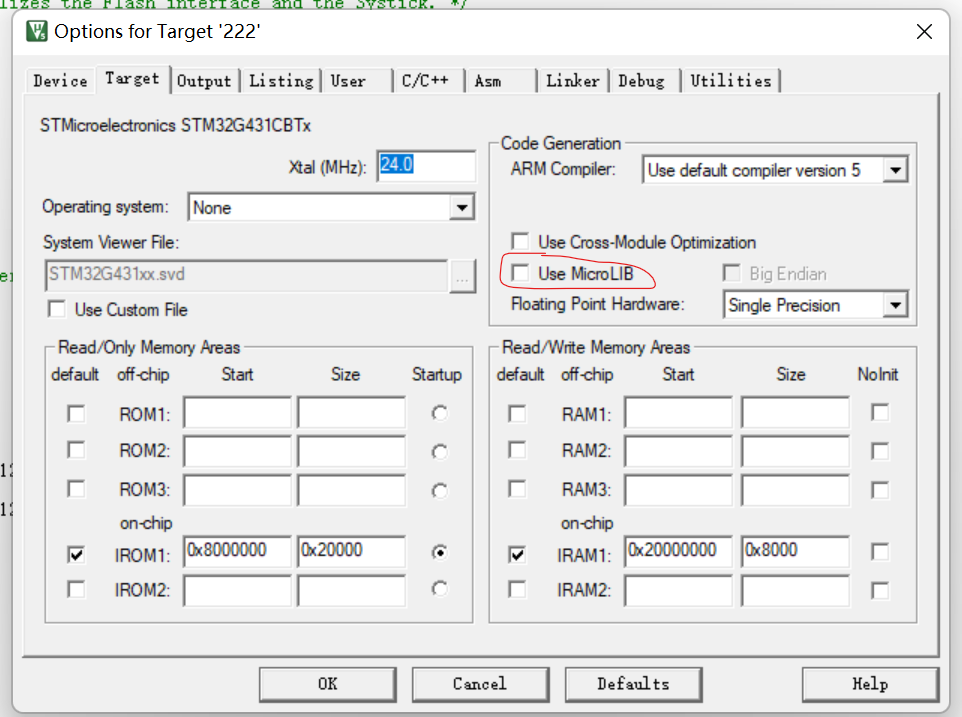
- 在Vscode中我们要在STM32cubemx生成的代码下,在usart.c文件中加入如下代码